Základní informace o třífázovém střídavém systému
Třífázový střídavý systém je široce používán, protože má oproti jednofázovému střídavému systému řadu výhod. Proto se elektrická energie nejčastěji vyrábí, přenáší a distribuuje mezi spotřebitele pomocí třífázových systémů. Převážná většina elektromotorů jsou třífázové střídavé motory.
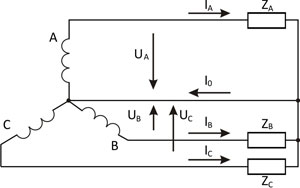
Aby bylo možné v třífázovém systému současně používat dvě různá napětí (například 380 V pro napájení elektromotorů a 220 V pro napájení elektrických lamp a dalších jednofázových spotřebičů), používá se čtyřvodičový napájecí systém. Čtyřvodičové vedení třífázového systému má čtyři vodiče: tři lineární, kterými protékají lineární proudy IA, IB, IC a jeden nulový (neutrální) vodič, určený k udržení stejných hodnot fázových napětí na všech třech fázích spotřebiče. Nulovým vodičem může protékat vyrovnávací proud I 0, nazývaný nulový nebo neutrální proud. Takový systém propojení vinutí třífázového generátoru a přijímačů (spotřebičů) se nazývá „hvězda“ a je znázorněn na obrázku 1.
2. Vlastnosti třífázového obvodu zapojeného do hvězdicového schématu
Při zapojení do hvězdy je fázový proud IФ a lineární proud IЛ i to tam je.

Napětí mezi vodiči sítě, nazývané síťové napětí (např. UAВ), ukáže se být Ö3krát větší než fázové napětí zdroje energie UA, UВ nebo UС:

3. Vektorové diagramy napětí a proudů v zapojení do hvězdy

Obrázek 2 Obrázek 3
Pokud je třífázový systém symetrický (všechny odpory a výkony fázových spotřebičů jsou stejné), pak všemi třemi fázemi protékají proudy stejné velikosti, fázově posunuté vůči sobě o 120°. Proud v neutrálním vodiči je nulový. Napětí na všech fázích spotřebiče se od sebe také liší pouze v počáteční fázi o 120° (obrázek 2).
Pokud jsou v různých fázích zapnuty různé spotřebiče energie (asymetrické zatížení), proudy každé fáze (v každém síťovém vodiči) se od sebe liší nejen počáteční fází, ale také velikostí. V tomto případě protéká neutrálním vodičem proud, jehož vektor se podle prvního Kirchhoffova zákona rovná geometrickému součtu vektorů fázových proudů (obrázek 3).0=IA+IB +ICPřerušení neutrálního vodiče (třívodičový systém) s asymetrickým zatížením vede ke změně napětí na všech fázích spotřebičů a ke vzniku neutrálního předpětí.
Téma: „Zapojení vinutí třífázového generátoru a přijímačů energie v trojúhelníku.“
Trojúhelníkové spojení se nazývá třífázový obvod, ve kterém fáze generátoru a fáze přijímače tvoří dva uzavřené obvody, v nichž je začátek první fáze spojen s koncem třetí, konec první fáze se začátkem druhé a konec druhé fáze se začátkem třetí.
Toki Ia, Ib, Ic se nazývají lineární a proudy Iav, Ivs, Isa — postupně.
Kladné směry elektromotorické síly (EMS) ve vinutích generátoru zapojených do trojúhelníku zůstávají stejné jako v zapojení do hvězdy: od konce vinutí k jeho začátku. Kladné směry proudů se shodují s kladnými směry EMS.

Zapojení „trojúhelník“ se získá spojením konců fází  a začátek fází
a začátek fází  podle obrázku 1.
podle obrázku 1.
2. Vlastnosti třífázového obvodu zapojeného do trojúhelníku
1. Neexistuje žádný nulový vodič a fázové napětí (na vinutí) se rovná síťovému napětí mezi vodiči napájecí sítě:

2. Síťový proud v síťových vodičích je větší než proud ve fázi (vinutí):

 |
3. Vektorový diagram napětí a proudů ve fázích generátoru, když jsou vinutí zapojena do trojúhelníku
Při připojování zátěží k třífázové střídavé síti v trojúhelníku bude každá skupina zátěží připojena mezi dva síťové vodiče.
Závěr: Uvažovali jsme tedy o třífázových symetrických elektrických obvodech střídavého proudu zapojených do trojúhelníku a hvězdy.
Velmi cennou vlastností čtyřvodičového systému je schopnost získat různá napětí.

Pokud tedy zapojíte přijímače energie mezi vedení a neutrální vodič, tj. do hvězdy, budou připojeny k fázovým napětím. Pokud zapojíte další skupinu přijímačů do trojúhelníku, budou připojeny pouze mezi vedení a budou pod napětím vedení, které je několikrát větší než fázové napětí.
Čtyřvodičový systém se široce používá pro napájení smíšených světelných a silových zátěží. Osvětlovací zátěže se připojují k fázovému napětí a silové zátěže (elektromotory) k síťovému napětí.
4. Napájení v třífázovém obvodu.
Výkon spotřebovaný zátěží z trojfázové sítě se rovná součtu výkonů spotřebovaných jednotlivými fázemi, tj.:

Při rovnoměrném zatížení je výkon spotřebovaný každou fází:

Spotřeba energie všemi třemi fázemi:

Při zapojení přijímačů energie do hvězdicového schématu platí vztahy mezi lineárními a fázovými hodnotami napětí a proudů:

Proto energie spotřebovaná zátěží z třífázové sítě:

Při zapojení přijímačů energie do „trojúhelníku“ platí vztahy mezi lineárními a fázovými hodnotami napětí a proudů:

Činný výkon spotřebovaný zátěží je tedy v obou případech
(spojené hvězdou a trojúhelníkem) bude rovno:

Jalový výkon pro zapojení hvězda-trojúhelník je:

Zdánlivý výkon v třífázovém obvodu se symetrickým zatížením:



Závěr: Při rovnoměrném zatížení je tedy energie spotřebovaná z třífázové sítě, bez ohledu na schéma připojení zátěže, vyjádřena vzorcem: (11)

Při nerovnoměrném zatížení je výkon ve fázích odlišný () a celkový výkon spotřebovaný zátěží se rovná:

Téma: „Střídavé elektrické stroje“.
Asynchronní motor.
Asynchronní stroje se obvykle používají v motorovém režimu. Asynchronní motor je nejběžnějším typem motoru v průmyslu.


Obrázek 1 Obrázek 2
Obrázek 1 znázorňuje řez asynchronním strojem s rotorem ve tvaru klece nakrátko: 1 – kostra, 2 – jádro statoru, 3 – vinutí statoru, 4 – jádro rotoru s vinutím ve tvaru klece nakrátko, 5 – hřídel.
Obrázek 2 znázorňuje řez asynchronním strojem s fázovým rotorem: 1 – kostra, 2 – vinutí statoru, 3 – rotor, 4 – sběrné kroužky, 5 – kartáče.
Asynchronní motor má bez hnutí část s názvem statorA rotující část zvaná rotorStator obsahuje vinutí, které vytváří rotující magnetické pole. Rozlišují se asynchronní motory s rotorem veverkové klece a fázovým rotorem. Do drážek rotoru s vinutím veverkové klece jsou umístěny hliníkové nebo měděné tyče. Tyče jsou na koncích uzavřeny hliníkovými nebo měděnými kroužky. Stator a rotor jsou sestaveny z plechů z elektrotechnické oceli, aby se snížily ztráty vířivými proudy. Fázový rotor má třífázové vinutí (u třífázového motoru). Konce fází jsou spojeny do společné jednotky a začátky jsou vyvedeny na tři kontaktní kroužky umístěné na hřídeli. Na kroužcích jsou umístěny pevné kontaktní kartáče. Ke kartáčům je připojen spouštěcí reostat. Po spuštění motoru se odpor spouštěcího reostatu plynule sníží na nulu.
Frekvence točivého magnetického pole statoru n1 závisí na počtu pólových párů motoru p, pro které je statorové vinutí navrženo, a z frekvence proudu třífázové soustavy n1=60f/pAktuální frekvence v obvodu (průmyslová frekvence) f= 50 Hz. Vzorec pak bude vypadat takto: n1 = 60*50/ot. = 3000/ot. ot./min.
Z vzorce vyplývá, že pro jakékoli mechanické zatížení, které motor dokáže překonat, je synchronní frekvence n1 zůstává nezměněn, protože závisí pouze na konstrukci statorového vinutí.
Rychlost rotoru п2 souvisí s frekvencí n1charakteristika motoru zvaná prokluz, s (malé písmeno): s = (n1 n2)/ne1 → n2=n1(1—s). Uklouznutí s se pohybuje od 0,01 do 0,06 neboli od 1 do 6 % a zvyšuje se se zvyšujícím se zatížením motoru. Proto jsou otáčky rotoru vždy menší než otáčky magnetického pole statoru motoru. S rostoucím zatížením motoru se frekvence п2 mírně klesá, což vede ke zvýšení klouzání sKvůli této nerovnosti п21 Motor se nazývá asynchronní.
Pro potřeby výroby se elektromotory vyrábějí s různým provedením statorových vinutí, což vytváří různý počet pólových párů. р a proto různé hodnoty frekvence n1Je třeba mít na paměti, že při změně počtu pólových párů р frekvenci n1 prudké změny. Plynulé nastavení změny frekvence n1 u asynchronních motorů to podle jejich konstrukce být nemůže. Z tohoto důvodu je nelze použít na kolejových vozidlech elektrické dopravy.
Tabulka 1 ukazuje hodnoty n1, odpovídající počtu pólových párů p, určeno konstrukcí statorového vinutí.
| P |
| n1, ot./min |
Je třeba mít na paměti, že synchronní frekvenci motoru lze určit bez výpočtů, ale pouze znalostí frekvence otáčení rotoru. n2 který se k němu co do velikosti blíží. Pokud například n2= 2930 ot/min, pak nejbližší ze zadané řady synchronních rotačních frekvencí může být pouze n1 =3000 ot/min nebo pro n2 =490 ot/min bude synchronní frekvence motoru n1 =500 ot/min atd. Proto je v pasu motoru uvedena pouze nominální hodnota otáček rotoru „nom“.
Bez ohledu na řadu motorů je metodologie řešení problémů při určování jejich technických vlastností stejná. Konvenční označení (značení) typů motorů se skládá z čísel a písmen, která se dešifrují následovně:
4ANA, X (50-355) S, M, L A, B (2-12) U 1, 2, 3,
4 — sériové číslo série; A — typ motoru (asynchronní);
Konstrukce motoru podle metody ochrany životního prostředí
(N – chráněné; pokud toto písmeno chybí – uzavřený, přefukovaný); verze motoru podle materiálu rámu a štítu (A – hliníkový rám a štíty; X – jakákoli kombinace litiny a hliníku jako materiálů rámu a štítu; absence značek znamená, že rám a štíty jsou vyrobeny z litiny nebo oceli); výška osy otáčení, mm (dvě nebo tři číslice); instalační velikost podle délky rámu S, M, L (S je nejkratší rám, M je střední, L je dlouhý); délka jádra statoru (A nebo B). Absence písmen znamená, že existuje pouze jedna délka jádra; za písmenem A nebo B, a pokud chybí, za instalační velikostí je uvedena jedna z číslic (2, 4, 6, 8, 10, 12) – počet pólů; Y – klimatické provedení (pro mírné klima); 1, 2, 3 – kategorie umístění (1 – venku, 2 – pod markýzami, 3 – v uzavřených nevytápěných místnostech).
Například konvenční označení elektromotoru typu 4A280M6UZ se dekóduje následovně: motor čtvrté řady, asynchronní, s uzavřeným dmýcháním (bez písmene H), litinový nebo ocelový rám a štíty (bez písmene A nebo X), výška osy otáčení 280 mm, instalační rozměr podél rámu mezilehlý (M); jedna délka jádra (bez písmene A nebo B), šestipólový (číslo 6), pro mírné klima (U), třetí kategorie umístění (3).
Počet pólových párů a synchronní frekvenci lze snadno určit z typu motoru.
V tomto příkladu je počet pólů šest. Počet párů pólů je tedy dvakrát menší, tj. р = 3. Podle vzorce pro n1 pojďme najít jeho hodnotu n1 =3000/ pavšak р = 3. Pak n1 =3000/3=1000 ot./min.
Točivý moment N*m libovolného motoru se určí podle vzorce
М = 9550 P2 / n, v tomto případě má tvar:
М = 9550 P2/n2Kde P2 — užitečný výkon na hřídeli motoru; n2 —otáčky rotoru. V nominálním režimu jsou hlavní parametry označeny: Mnom, R2nom, n2nom.
2. Užitečný výkon na hřídeli motoru
Р2 =√ 3Uл Iл η cosφ,
kde Uл Iл — lineární hodnoty napětí a proudu; η — účinnost motoru; cos — účiník motoru. Z tohoto vzorce Iл = P2/(√ 3Uл η cosφ).
3. Účinnost motoru η = P2/P1→P1 = P2/η kde P1— činný výkon spotřebovaný motorem ze sítě, který lze také určit podle vzorce P1=√3Uл Iлcosφ
Téma: „Stejnosměrné elektrické stroje“.